


| 产地 | 广东 |
|---|---|
| 产品名称 | 总线式智能软件运动控制平台 |
| 产品认证 | CCC |
| 额定电压 | 具体请咨询 |
| 适用范围 | 自动化设备、视觉检测、PLC的一体化控制 |
| 售后服务 | 全国联保 |
| 用途 | 自动化设备、视觉检测、PLC的一体化控制 |
| 品牌 | 旗众 |
| 型号 | qz |
| 加工定制 | 否 |
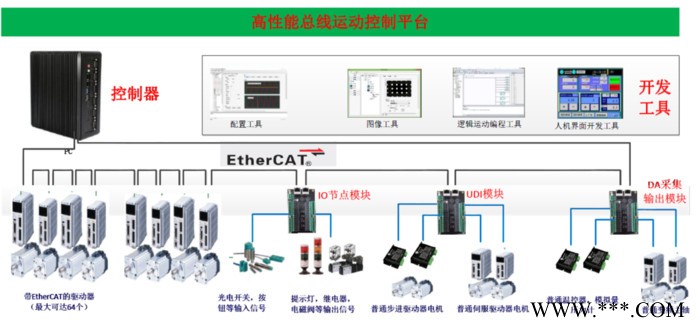
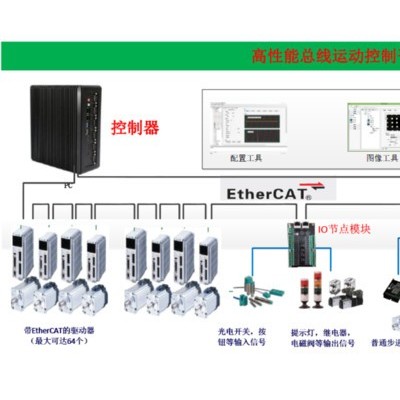
Soft Motion Controller**运动控制的未来!
只需要一台普通PC,用实时运动控制软件**可以实现对自动化设备、视觉检测、PLC的一体化控制。

SoftMotion Controller简介
SoftMotionController,是基于PC的软件运动控制产品的**引领者,13年以来致力于用高端软件算法取代繁琐和昂贵的硬件控制器和控制卡,为全世界的设备厂家提供灵活和具有性价比的软件控制系统产品,可以对CNC数控机床、各种自动化设备、工业机器人实现高控制精度和高速度的一体化控制。
旗众智能产品为EtherCAT总线通用软件运动控制系统和工业机器人控制系统,与国内外众多3C电子、半导体和自动化设备厂家建立了长期深入的合作关系。
技术概要 Technology
1.软件运动控制
SoftMotionController的”软件运动控制”使用软件代替控制器。
SoftMotionController利用软件实现所有的运动控制功能,不需要任何运动控制卡或者专用芯片,所有运算都在通用计算机的CPU上完成,充分发挥目前CPU的超高速、超**(双精度浮点运算)的运算能力。随着CPU的速度和性能的提高,软件运动控制系统的速度和性能也随之提高。
软件运动控制的算法运动在硬实时软件操作系统。可将微软Windows改造成实时操作系统。实时操作系统直接对硬件进行管理,因此不需要DSP等硬件芯片也能保证微秒级的硬实时。这个多任务/多线程实时软件架构使得对实时性要求苛刻的伺服运动控制程序也可以在单一的CPU上运。SoftMotionController软件运动控制系统中已经包含有配置好的实时操作子系统。
CPU可以同时完成所有实时伺服和其他控制任务,包括闭环控制、加减速、多轴联动、PLC、G代码执行、NC路径生成,并提供图形化用户界面、程序的编译/加载、文件管理、数据处理、网络通信功能。多轴高速伺服环路在单个CPU内部进行闭环,可获得高速高精度的运动控制。因此,客户不用受制于硬件系统对轴数的限制,不用付出昂贵的硬件扩展成本,只用更改软件**可以实现多达64轴的实时运动控制。
软件架构
在单个通用CPU的硬件上,系统软件架构由三层构成。
1.下层为运动控制的实时层,通过实时子系统的扩展,使得通用的操作系统有了硬实时的能力。实时层直接同CPU通讯,被CPU赋予****别的独占的中断优先级。这一层由3个实时模块组成:运动控制内核、PLC内核、解释器内核。运动控制内核是实时层的核心,他负责对所有的任务进行调度,对其他内核提供接口,负责完成与上层的**和命令交换、与解释器内核完成运控数据和命令交换、与解释器内核完成运动数据的缓存处理和执行、与PLC内核完成PLC输入输出数据的交换、与总线主站完成总线通讯的建立和中止以及伺服和输入输出数据的交换。
2. 中间层为实时动态链接库层,他为实时层和通用操作系统下的用户提供接口,将**和指令传输到实时层进行处理,并将结果反馈给用户应用层。这些数据、反馈和执行包括设备控制、系统初始化、参数设置、数控系统控制指令、手动操作指令、自动操作指令、测试和采样数据、输入输出指令、PLC执行、数控和伺服状态监测等。
3. 上层为操作系统层。**和应用在操作系统层运行,通过**语言对运动控制和逻辑函数库和第三方函数库的调用,用户可以开发各种控制系统应用。
操作系统
SoftMotionControler的运动控制软件(包含实时内核)可以运行在微软公司的Windows XP和Windows 7上(32/64)。无论是操作还是开发,Windows系统都给了**和用户**短的适应和开发周期,提供了**的操作界面和**大的扩展性。
实时子系统
众所周知,Windows是非实时的操作系统,通过实时操作系统,可以将Windows转变成实时操作系统。
通过在操作系统上添加实时的,先占式的多任务机制,RTX使得在Windows下可以实现实时程序的开发以及处理高性能、硬实时特性的关键任务。计时精度可达1微秒。终端延迟(IST latencies)小于10微秒。因此,用一台电脑上,操作系统可以同时进行实时和非实时的任务处理,并且Windows进程无法干涉实时进程的运行。
运动控制内核
运动控制内核是整个软件架构的基础与核心。位置环和速度反馈环可以在运动控制内核中进行闭环控制(根据控制模式和伺服控制周期的不同);运动控制内核完成实时运动控制闭环算法、路径规划、插补、加减速曲线、补偿、平滑等功能;运动控制内核从高层的用户应用中接受指令,并通过总线将命令传送给伺服和IO设备。
技术概要 Technology
PLC内核
● PLC 内核与运动控制内核无缝集成,协作执行PLC顺序程序;
● 与三菱PLC指令和梯形图逻辑兼容;
● 提供确定性的,实时的性能保证,扫描周期1-5ms;
● 可检测运动状态和发送运动指令(PLC轴功能);
运动解释器内核
● 每秒1000个程序段高速处理;
● 包含运动指令的环状高速缓存;
优势
1.创新性和经济性
● 无需昂贵的专用处理芯片,软件运动控制可以轻松实现复杂的各种算法和通讯
● 无需任何运动控制板卡,软件运动控制可在内核中进行多轴的高性能的闭环算法
● **小化的通用硬件可以带来显而易见的经济性,以及简易的接口和线缆,打打较少故障率
● 安装和集成十分简便快捷,加速产品上市时间
2.强大的性能
● 充分发挥目前通用CPU的超高速、超**(双精度浮点运算)的运算能力
● 随着CPU的速度和性能的提高,软件运动控制算法速度和性能也随之提高
● 运动控制内核完成实时控制闭环算法、前馈、路径规划、插补、加减速曲线、补偿、平滑等功能
● 运动控制内核和软PLC内核无缝集成,协作控制
● 支持多种运动控制模式和众多可选供能
3定制化和可扩展
● 提供开放式的平台和开发环境,用户可以实现独特的产品理念,用自身的技术经验构建**好的运动控制产品
● 用户可轻松集成第三方的应用到统一的运动控制平台上,如视觉系统、数据库、网络应用等
4.简单快速的系统集成
● 因为**小化的硬件,布线和连接十分简易
● 提供设置测试软件
● 完善的技术文档和国际性的技术支持
● 提供各种应用示例程序
5.灵活的硬件组合
● 灵活配置轴数目和IO点数
● 灵活选用各种EeherCAT总线伺服和IO模块
● 可选用各种通用脉冲型伺服、步进伺服
● 可选用EtherCAT总线主轴驱动器或模拟量变频器
● 可控制各种直线电机和DD马达
● 可选用各种通用的显示器、键盘鼠标或PC用触摸屏,也可选用CNC专用面板和示教器
2.EtherCAT总线
EtherCAT总线是开放的实时以太网总线,是国际IEC62407规范以及中国**标准GB/T31230.1-6,用于主站与EtherCAT伺服(COE)和IO设备的网络通讯。
简介
EtherCAT实时以太网总线,在物联网和工业4.0、中国制造2025快速发展的**,将成为智能制造中的重要基础,与上层的ERP和生产管理系统可以无缝连接,发挥越来越重要的作用。
SoftMotionControler从2009年开始进行EtherCAT总线技术研究与产品应用,拥有业界**的总线控制应用经验,所有主站从站大码均自主开发完成,可以帮助用户快速的分析问题,提供主从站配置、选型及排除故障的**的解决方案。SoftServo软件运动控制通过EtherCAT总线以TJ45网线依次连接电脑端的网卡和伺服或IO设备端的总线接口,可以同时控制多达64轴(及更多的IO从站模块),伺服控制周期**可0.25ms。简单的配置和通用的线缆,无需硬件板卡,在集成和维护上师范的经济和简便。
EtherCAT特点
● 通讯速率——1000M实时以太网通讯
● 快速——伺服控制周期**短至0.25ms
● 简易布线——菊花链式,无需终端接头
● 使用接通的以太网直连电缆
● 有系统自带的软件工具,易于配置、诊断和维护
● 成熟的自主技术和广泛的应用
● 可以使用冗余接线来防止线缆或结点的失效带来的整个系统停止
● 不同厂商的EtherCAT设备可以被连接到同一个网络中
● 可以实现热插拔功能

